Trends in Extraterrestrial Planetary Resource Exploration and International Technology
Trends in Extraterrestrial Planetary Resource Exploration and International Technology
▲ Research Specialist Ryu Byung-hyun, Department of Future & Smart Construction Research
Prologue
Since the Space Age began in the 1960s, there have been 60 lunar missions, eight of which have been human piloted or crewed missions. Apollo 11 was the first crewed mission to land on the moon in 1969, and later Apollo 15 brought rock samples back from the surface, putting more weight on the hypothesis that the moon was born from a massive collision with Earth. Human understanding of the extraterrestrial universe has been broadened through such lunar exploration, with human interest in Mars growing even further since. In 1997, Mars Pathfinder was the first mission to land a mobile rover on the surface of Mars, with photos sent from the rover attracting great public attention and further promoting the Mars exploration. However, as the Mars exploration became more challenging, humankind has begun to show interest in lunar exploration once again. The reason that governments and enterprises of each nation are actively engaged in lunar exploration in the space development competition is that the moon is not a mere subject of mystery but is closely related with the future of humankind.
Our terrestrial resources are naturally and gradually being depleted due to their natural scarcity, even though the rate may vary depending on how quickly they are consumed. The anticipation that humankind could continue to subsist solely on Earth's resources indefinitely is now long gone. Instead, humankind has been devising ways to conserve resources while producing various solutions such as the development of alternative energy and alternative materials. On the other hand, humanity is also pondering how to make use of extraterrestrial resources. Many of the objects in space are astronomically distant from us, with only a few countries having the means of transportation, and the costs are likewise astronomical. Tapping into extraterrestrial resources was thus merely a topic of the imagination in the past. Recently, however, new ideas have been emerging to tap into the virtually unlimited resources of outer space.
Discovery of Extraterrestrial Planetary Resources
The discovery of extraterrestrial planetary resources dates back to when the samples that the Apollo spacecraft brought back from the moon were analyzed. Since that moment, when helium-3 was discovered in these rocks brought back to Earth, the amount of helium-3 in the lunar rocks was investigated, and the resources from each lunar landing site began to be estimated. The US had collected 382 kg of return samples from the lunar sea and high mountain regions of the moon through its Apollo program (Lucey et al., 2006), and Russia also analyzed 170.1 g of lunar samples (Wikipedia, 2017b) brought back to Earth, enabling them to understand the soil and rocks on the lunar surface. This was done to estimate where and how much of the resources were distributed on the lunar surface based on the lunar samples. Later, there was a new discovery from the Clementine mission of iron and titanium, forming the mineral map for the moon. The discovery of permafrost also suggested, for the first time, the possible presence of water on the moon.
Launched in 1998, the Luna Prospector mission mapped the water as well as thorium and potassium, the natural radioactive elements, using epithermal neutrons. Most of the findings from these past missions were obtained by remote sensing, and they played a major role in creating maps that provide an understanding of the resources on the lunar surface. The gamma-ray spectrometers used in the Luna Prospector and Kaguya missions enabled the provision of maps of several major elements, and the gamma-ray spectrometer of the Kaguya mission produced, for the first time, the map for uranium. After remote sensing by the orbiter, Chang'e-3 was able to perform elemental analysis on the lunar surface using an x-ray spectrometer, but continued analysis was not possible due to the difficulty of rover survival. This phase of human discovery of resources on the moon and the estimation of their distribution is evolving into an on-site extraction experiment to confirm and utilize the findings on the lunar surface in the future. We are turning into reality our dreams of starting resource exploitation activities that would allow us to settle on survivable area on the moon, utilize local lunar resources, and provide energy resources, such as helium-3, which will be needed on Earth in about 10 years.
Resources in Lunar Poles
The Lunar Crater Observation and Sensing Satellite (US LCROSS) and Lunar Reconnaissance Orbiter (LRO) missions to the Moon were launched in June 2009. Following the new findings obtained as a result of the LCROSS collision with Cabeus, a crater at the moon's southern pole, the possibility newly presented itself for humanity's future utilization of the resources of the lunar poles. LCROSS announced that it had discovered water in the lunar southern pole, which is a requirement for humankind to build a lunar base. LRO has laid the foundation for the construction of a lunar base by orbiting the moon at an altitude of 50 km, focusing on the search for resources, including water, and scanning the lunar radiation environment. Based on the findings obtained using the Diviner Spectrometer mounted on the LRO, volatile substances and rare metals as well as water, brought by comets and asteroids, were estimated to have been deposited in permafrost on the lunar surface for billions of years since the moon was formed, and these materials were found to have been eroded at a loss rate of 1 mm per billion years (Paige et al., 2010), signifying the importance of the utilization of lunar permafrost resources (Colaprete et al., 2010; Gladston et al., 2010). These new findings provided an opportunity for major countries including the United States to seriously consider their plans for the construction of lunar bases as intermediate bases and the utilization of lunar resources in planning for the long-term exploration by humans of planets in more distant solar systems, as well as Mars. As a result of the LRO/LCROSS lunar missions, it was discovered that the lunar southern pole, a permafrost region, contains several volatile substances and has high content of rare metals such as gold, silver, and mercury. These substances are believed to have been brought from outside the moon (Gladstone et al., 2010).
Drilling for Extraterrestrial Planetary Resources
Recently, it has been revealed that water is present in the form of ice on extraterrestrial bodies such as the moon, and extraterrestrial resource exploration projects are being actively conducted centering on National Aeronautics and Space Administration (NASA) and China Association for Science and Technology (CAST). Furthermore, the European Space Agency (ESA) has announced the construction of the Moon Village and is leading the international cooperation necessary for the development of core technologies.
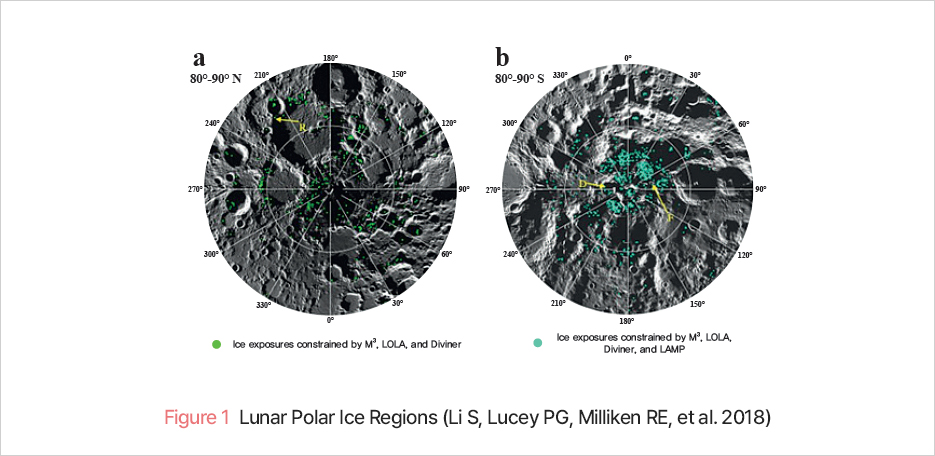
In 2018, a team of researchers at the University of Hawaii discovered ice traces in the “Permanently Shadowed Regions” at the northern and southern poles of the moon. It has been speculated for a long time that water or ice has existed on the moon, but the research team at the University of Hawaii was the first to present conclusive evidence of this. The existence of water components has been identified in the past, but this was the first time that the molecular (H2O) form of water has been discovered. As the existence of usable water became clear during the lunar missions, the lunar explorations prepared by different countries were also able to gain momentum.
Water in ice or liquid state cannot exist on the surface of the moon because its temperature rises to 130°C or higher when exposed to sunlight, which causes it to evaporate. Permanently shadowed regions in the surface craters of the south pole of the moon, which never receive direct sunlight, were thought to have ice because the temperature is believed to always be kept below -180°C. Based on this, scientists have speculated that water may exist in these regions. In 2009, NASA confirmed the presence of water by deliberately crashing the LCROSS spacecraft on the southern pole of the moon. However, it was not clear whether this was an actual form of water or of other substances (Li S, Lucey PG, Milliken RE et al., 2018). Water can be detected using infrared light, but so far only the 3㎛ wavelength band has been employed. With this wavelength, the water molecule could not be clearly distinguished from the hydroxyl group (-OH) bound to the mineral. If hydrogen and oxygen are present but merely as components in the state of attachment to a mineral rather than in the form of water, other additional processing is required to make use of it from this state.
So far, it has been speculated that water in the form of water molecules is present in the regions of the lunar southern pole at a concentration of about 100 - 400 ppm. Whether water exists there depends on the surrounding topography, and it has been analyzed that this does not mean that water is present throughout the region. As this type of water exists in vitrified soil or between gravels, it is assumed that it remains even in the extreme environment of the moon. In addition, it was analyzed that there are many places where water can remain in the form of ice at the northern and southern poles. A team of scientists led by Professor Paul Hayne of the Laboratory for Atmospheric and Space Physics at the University of Colorado Boulder, USA said in a study published in the Nature Astronomy journal on the same day that “Permanently Shadowed Regions,” which may serve as ice reservoirs or cold trap at the moon’s northern and southern poles, measure at approximately 40,000 m2, or about six times the size of a football field (P. Hayne, O. Aharonson, N. Schörghofer, 2020). As the presence of water at the southern pole became evident, nations are pushing ahead to explore this area competitively. On the moon, the southern pole has more uneven surfaces compared to those of the equator, and communication is difficult, making exploration even more challenging. However, because of the presence of water, which is essential for life and can be used for exploration, different countries have designated the southern lunar pole as an exploration target. The United States announced the "Artemis Program" to send crewed spacecraft to the moon by 2024 and designated the southern pole as a landing point. China is also planning a "Chang'-e 7" mission to the Moon in 2024.
NASA and CAST are scheduled to bring soil samples from extraterrestrial planets back to Earth through their extraterrestrial resource exploration projects. To accomplish this, it is necessary to develop drilling equipment that can be stably operated in extreme space environments. An extraterrestrial drill is equipment that can collect not only extraterrestrial planetary surface samples but also underground samples during the drilling process. It should thus be developed in an ultra-lightweight and compact form that enables uncrewed operation with low power and high efficiency in the extreme environment of space as well as transportation from Earth to the extraterrestrial bodies.
The Korea Institute of Civil Engineering and Building Technology (KICT) is developing a drill for extraterrestrial resource exploration by reflecting this trend of international space missions, and intends to devise a method for evaluation that can directly estimate the uniaxial compressive strength of the ground that resists destruction by using the drilling information of the drilling equipment. In this regard, we would like to introduce here a series of processes of performance verification for a drilling rig, the development of bits, and the derivation of evaluation techniques, all through laboratory experimentation as basic research.
Trends in Extraterrestrial Planetary Geotechnical Survey Technologies
NASA succeeded in drilling into the lunar surface for the first time after a crewed lunar landing with the Apollo 15 mission in 1971. The drilling equipment used was called the Apollo Lunar Surface Drill (ALSD) and was a battery-powered portable drill used for drilling by the Apollo 15 crew. NASA's drilling equipment has been advanced dramatically through research and development, and its representative drilling equipment is the icebreaker drill developed by Honeybee Robotics, Ltd. This icebreaker drill was developed to search for signs of life in the ice-rich regions of Mars. Considering the conditions, such as lower gravity and atmospheric pressure compared to those of Earth, finite electrical energy, and an environment where it is difficult to use cutting oil, this equipment set its performance target of achieving 1 m deep drilling depth within one hour at power of 100 W and thrust of 100 N or less. It succeeded in achieving this performance target in a vacuum chamber experiment with an environment similar to that of Mars. The icebreaker drill consists of a deployment boom, Z-stage, rotary-percussive drill head, auger, drill bit, and sampling system. The deployment arm is a 3-DOF (Three Degrees of Freedom) cantilever that moves the Z-stage to the drilling point. The Z-stage is composed of a rail that moves in a straight line, a table and pulleys that move in a straight line, and cables, and is a device that transports an auger and drill bit in a straight line in the drilling direction.
The rotary-percussive drill driving unit applies a rotary percussion to the auger drill bit to provide the torque and thrust required for drilling. The auger implements cutting material transport and sample collection functions. The drill bit is a cutter placed at the end of the auger. The icebreaker drill bit has an embedded temperature sensor and electrical conductivity sensor to monitor the temperature of the drilling environment around the drill bit and the physical condition of the materials being cut in real time during drilling. The sample extraction unit consists of a device for extracting the cut materials attached to the auger groove.
After the Chang'e 3 mission's successful landing on the moon for the third time in the world in 2013, CAST launched the Chang'e 5-T1 (嫦娥五号T1), an uncrewed spacecraft that would bring samples from the moon back to Earth in 2020. Chang'e 5-T1 was launched from the Wenchang Space Launch Center in Hainan province, China, and landed on the "Ocean of Storms," a plain in the northwestern region of the moon, and collected about 2 kg of soil and rock samples. It then launched again from the lunar surface and made its way back to Earth. In December 2020, the Chinese National Space Agency (CNSA) announced that a capsule containing soil collected from the moon by Chang'e 5-T1 had landed in Inner Mongolia. China thus became the third nation to have brought lunar soil to Earth, after the United States and the Soviet Union. Chang'e 5-T1 has succeeded in bringing lunar soil back to Earth for the first time in 44 years since the Soviet Union's uncrewed Luna 24 mission in 1976.
For lunar drilling research, China has been manufacturing a drilling test bed since 2016 based on Zhang Tao et al. (2016) and conducted experiments on drilling equipment to be applied in its mission to explore lunar resources. Mechanically, it is composed mainly of a body frame, a rotary mechanism, a penetrating mechanism, and encoders. The body frame is a structure that supports the rotary mechanism and the penetrating mechanism. The rotary mechanism is the unit that causes a drill tool to rotate, and the penetrating mechanism is the unit that forces the drill tool to drill into the lunar surface and sample the lunar soil. The encoder unit is composed of two encoders, which have the respective functions of measuring the rotational velocity of the rotary mechanism and the drilling speed of the penetrating mechanism.
Status of KICT’s Development of Extraterrestrial Planetary Drilling Equipment
The world's space powers are competing fiercely for resource exploration by developing drilling equipment that can be used in the environments of space. Accordingly, the Korea Institute of Civil Engineering and Building Technology (KICT), as a latecomer, began developing drilling equipment for the exploration of extraterrestrial resources in 2016. Currently, we are manufacturing prototypes of drilling equipment and conducting performance tests under various extreme environmental conditions.
Mechanically, this equipment is composed mainly of a body frame, a driving unit, and a rotary unit. The body frame maintains the vertical position of the drill and supports the driving unit and the rotary unit. The driving unit consists of a vertical motor capable of vertical transport and a gearbox for speed control. The rotary unit consists of a bit-auger rotary motor, a bit-auger connection part, and a gearbox for rotation speed control. The auger serves to transport the cut materials and collect samples. The bit refers to a cutter installed at the end of the auger. One of the characteristics of this drilling equipment is that it has an integrated load cell, which can simultaneously measure reaction force and torque. In addition, the drilling speed can be estimated by the number of revolutions of the vertical motor, as it moves along the timing belt attached to maintain the vertical feed and vertical position of the drilling equipment.
An encoder-coupled planetary reduction DC induction motor is mounted, capable of precise control of 48.6 W output for rotation of the auger, with a gear reduction ratio of 1:230. The output shaft of the motor is connected in the order of a reduction gear, a drive shaft, a torque meter, a drill bit clamp, and a drill bit. The driving force of the motor is used to cut and crush the center of the specimen by rotating the drill bit at the bottom. The motor is driven with a power of 24 V, rated current of 2,850 A (ampere), and rated speed of 3,550 rpm, and drills while rotating at a constant speed under the rated load.